
סיפורנו מתחיל במתכנת אמריקני מסוים, בואו נקרא לו נ', שאני מכיר (לא אישית) דרך הרשת. נ' הוא מקצוען כבד בשפת Object Pascal וגם, עד כמה שאני יכול לשפוט, בעל הבנה מעמיקה בכל מה שקשור להנדסת תוכנה, ניהול פרוייקטי תכנות וכל הדברים הגדולים והחשובים האלה. מדי פעם, לקול מצהלות העוקבים אחריו ברשתות החברתיות, נ' מציג פיסות קוד תמוהות ועקומות שהוא מוצא במסגרת עבודתו.
חיישני רוורס תוצרת בית
בפוסט זה אציג את הטכניקות בהן השתמשתי ליצירת חיישן התראה אחורי למשאית צעצוע. מערכת זו מבוססת על חיישן אולטרה-סוני פשוט מדגם HC-SR04 ומיקרו-בקר ATtiny85, וכמו המערכות האמתיות לרכב, היא מציגה התראה ויזואלית על גבי שורה של נוריות LED צבעוניות. ראשית, הנה וידאו של המערכת בפעולה:
הלו טייני #3.5: רק רגע, בבקשה!
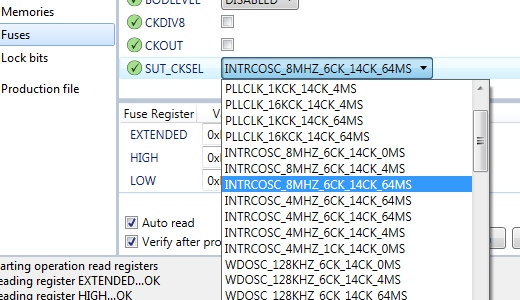
בפוסט מס' 2 בסדרה דיברתי על הגדרות שעון שאפשר לבחור עבור ה-ATtiny85 (ומיקרו-בקרים אחרים ממשפחת AVR) באמצעות צריבת פיוזים. מבחר האפשרויות היה כה גדול, עד שבחרתי לדלג שם על חלק מהפרמטרים ולהתרכז אך ורק במקור השעון ובתדר שנבחר עבורו. כעת נתקלתי, לראשונה, במצב בו גם הפרמטרים הנוספים חשובים. אז כהשלמה קטנה לפוסט על הגדרות השעון, בואו נדבר על השהיה באתחול.
תרגיל בג'וקים: דיבאונס עם מונה עשרוני
לפני זמן-מה הצגתי כאן את הג'וק CD4017BE, הידוע בכינויו "מונה עשרוני" ("Decade Counter"), וציינתי שבימינו די קשה למצוא לו שימושים מעשיים. בתגובות לפוסט הנ"ל הוצעו אפשרויות ספורות, ומשני ג'וקים כאלה יצרתי גם קישוט אורות לסוכה, אך רוב הג'וקים שקניתי במבצע באיביי עדיין נותרו ללא שימוש. ובכן, מסתבר שיש עוד משהו שאפשר לעשות איתם – לפחות כתרגיל מחשבתי…
עיצוב חדש לאתר
ברוח ההתחדשות הכללית של כל מיני אתרים, וכדי שהמערכת תפסיק להציק לי עם השדרוג של ערכת הנושא הקודמת, החלטתי לעבור לעיצוב חדש, מודרני ותקני יותר. ניסוי ראשוני הראה שערכת הנושא הזו מסתדרת לא רע עם העברית, ואפילו יש סיכוי שהיא תתאים קצת לתצוגה בסמארטפונים, טאבלטים ושאר צעצועים.
אם יש לכם משהו לומר בעד או נגד העיצוב החדש, אם נתקלתם בתקלות ובאגים מכל סוג שהוא, אנא דווחו בתגובות ונראה אם ומה אפשר לעשות בנדון 🙂
למה 32 ביט יותר טוב מ-8 ביט?
המיקרו-בקר של הארדואינו Uno הוא של 8 ביטים. זה של ה-MSP430 Launchpad עובד עם 16 ביטים, וללוחות מתקדמים כמו Arduino Due, Tiva-C Launchpad ואפילו Rapsberry Pi יש מיקרו-בקרים/מעבדים של 32 ביט. מה זה בעצם אומר? מה נותן המספר הזה? למה אין מיקרו-בקר של, נניח, 19 ביטים, ואיזה כדאי לבחור בשביל הפרויקט הבא שלכם?
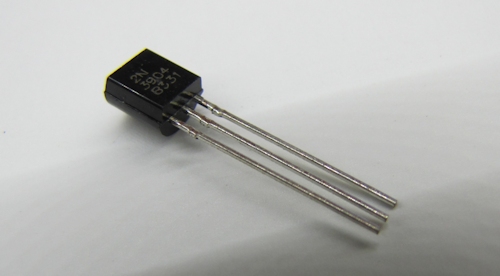
איך לחבר טרנזיסטור
הטרנזיסטור (Transistor) הוא רכיב פשוט יחסית, אך הוא מלווה בטרמינולוגיה שכאילו נועדה להקשות על החובב המתחיל. בפוסט זה אסתפק במינימום ההכרחי, כולל דוגמה קטנה, ואת ההבנה המעמיקה יותר נשמור לעתיד. זה לא אומר שזה יהיה קצר… 🙂
הלו טייני #3: פורט אחד קטן
פוסט קצר וקל זה עוסק בפורט (Port) של ה-ATtiny85 – אמצעי הגישה שלנו לקריאה וכתיבה של ערכים דיגיטליים בפיני הקלט/פלט. לטייני יש אמנם פורט אחד בלבד, שמסומן באות B, אך גם מיקרו-בקרים אחרים ממשפחת AVR עובדים באותה שיטה, כך שמה שאציג כאן מתאים – עם התאמות מינימליות – גם לעבודה בארדואינו.
מדור פרסומי: 4Probot – פרק שני
אחרי שהדגמנו את הפעולה התקינה של בקר המנועים, הגיע הזמן לתת לרובוט הניסיוני קצת אישיות ולהכין אותו לקראת פעולות מורכבות יותר. הדבר בוצע בשתי דרכים שיוצגו בפוסט זה: 1) הכנת מערכת תאורה, ו-2) מעבר ללוח קומפקטי עם ארדואינו Pro Mini. כרגיל, נפתח בהדגמה של הרובוט המשופצר בשטח:
סיפורי אופטימיזציה: קוד קל-משקל
כשאומרים "אופטימיזציה של קוד", הכוונה בדרך כלל לשינויים שיגרמו לו לרוץ מהר יותר, אבל לפעמים המטרה היא דווקא לעשותו חסכוני יותר בזיכרון – ופה ושם משיגים את שתי המטרות גם יחד. זהו המקרה של מפענח קוד המורס שבניתי. אז קודם כל, הנה המערכת בפעולה: