באג מטריד ומוזר במערכת הוכיח שאסור לסמוך על שום אלמנט לאורך הדרך, גם אם הוא נראה שולי, תמים ותקין לגמרי.

באג מטריד ומוזר במערכת הוכיח שאסור לסמוך על שום אלמנט לאורך הדרך, גם אם הוא נראה שולי, תמים ותקין לגמרי.
משרד החינוך שולח את ילדי בית הספר היסודי ללמוד תכנות בסביבת פיתוח מבוססת-רשת, שבה מנסים לגרום לקוף מצויר לאסוף בננות מצוירות. האם זו אכן שיטה יעילה? בתור מישהו שלמד לתכנת לפני שהייתה בכלל רשת, הנה ההתרשמות שלי מהקוף המפורסם.
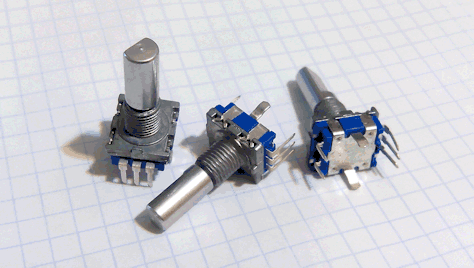
האם אפשר לנסח אלגוריתם לקריאה של מקודד סיבובי, שפותר לגמרי את בעיית ה-Bounce מצד אחד, ומצד שני לא נופל בפח של היפוך כיוון הסיבוב כפי שקרה לאלגוריתם הקודם שלי?
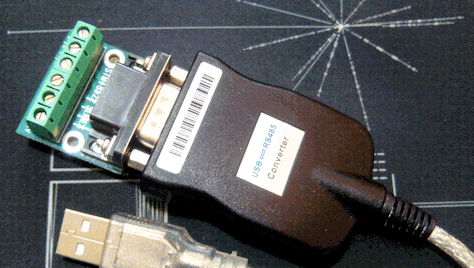
הפרויקט שלכם זקוק לתקשורת RF אמינה לטווח קצר, בעלות אנרגטית סבירה? המודול HC-11, שמבוסס על השבב CC1101 של TI, עשוי להוות פתרון נוח וזול יחסית. הנה כמה פרטים והוראות שימוש בסיסיות.
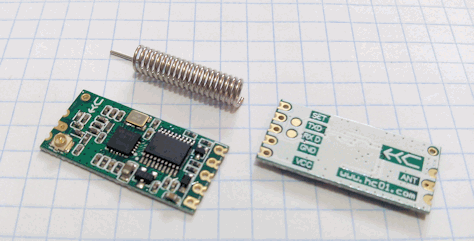
הפעמון האלחוטי הקודם שבניתי לבית נפח את נשמתו. הגיע הזמן ליצור דגם חדש ומשוכלל יותר, והפעם על בסיס מודול התקשורת האלחוטי HC-11.

בחינה של האותות שמתקבלים ממקודד סיבובי פשוט (Rotary encoder) הראתה שכאשר פיני הפלט שלו עוברים בין מצבים, קפיצות המתח האקראיות (Bounce) יכולות להיות קצרות מאוד או ארוכות מאוד, בהתאם למהירות הסיבוב של המקודד – עד כדי אי יכולת להבדיל בין קפיצה כזו לבין אות לגיטימי. האם אפשר ליצור קוד שיתגבר על כך וייתן לנו קריאה מדויקת של הסיבובים על פני כל טווח המהירויות?
לפני שלוש שנים, בעודי לומד מה-Datasheet את התכונות הבסיסיות של המיקרו-בקר ATtiny85, גיליתי שאני יכול להפעיל אותו על בסיס אות שעון חיצוני בקצב איטי עד כדי גיחוך של 1Hz. בדיון הזעיר שהתנהל בנושא העליתי את הרעיון של עבודה בקצב איטי עוד יותר – עליית שעון אחת ביום, או 0.000011574Hz – כדי ליצור מערכת שמדליקה לד מדי שבת, כאשר אות השעון מבוסס איכשהו על המחזור הטבעי של יום ולילה.
הרעיון הזה מטופש מכדי להשאיר אותו לנצח בגדר תיאוריה, נכון? 🙂
שורה של מחדלים הובילה לכך שסוללת הליתיום-יון של הלפטופ של הילדים התרוקנה ל-0%, והמחשב סירב לטעון אותה. מבצע החייאה נואש הציל אותה מטיול חד-סטרי לפח המחזור, ואותי מלבזבז עוד כמה דולרים בסין.

אחד הדברים הראשונים שמשתמשי ארדואינו לומדים הוא לקשר מספרי פינים מסוימים עם פונקציות ספציפיות: פינים 0 ו-1 הם RX ו-TX של Serial, פין 5 הוא אחד מהשישה שמסוגלים להוציא פלט PWM, וכן הלאה. במיקרו-בקרים מודרניים יותר, מוסכמות כאלה לא תמיד תופסות – לטוב ולרע. הנה כמה הסברים ודוגמאות.
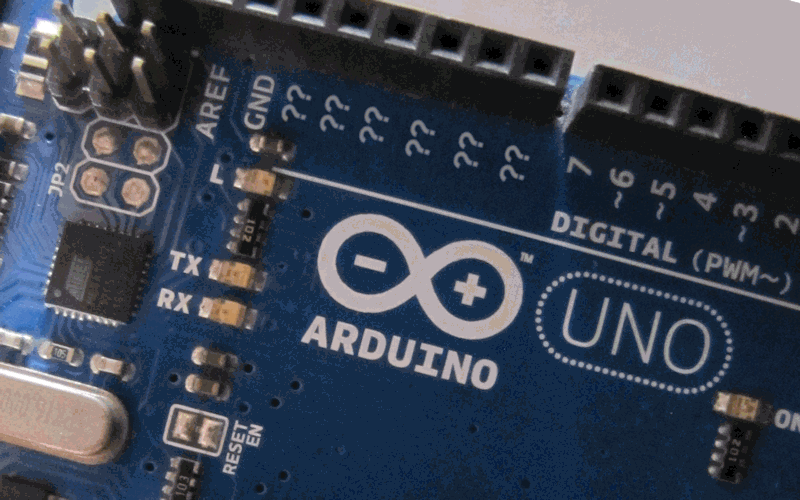
להמשיך לקרוא תעביר את זה הלאה: הקצאת פינים דינמית במיקרו-בקרים
בקושי שלושה חודשים עברו מאז שקניתי את לוח הפיתוח של ה-EFM8 Busy Bee, וכבר התפניתי לשחק איתו קצת ולכתוב קוד בלינק בסיסי למיקרו-בקר המבטיח מבית Silicon Labs. הנה הפרטים הראשונים…