
לפני שנתיים ומשהו כתבתי תוכנת Desktop כתחליף משוכלל לסריאל מוניטור המוגבל-מאוד של ארדואינו. מאז השתמשתי בה לעתים קרובות, עד שבאג מסתורי צץ משום מקום ואיים להרוס את כל העבודה שעשיתי. הנה הסיפור על זיהוי הבעיה ועל הפתרון הלא-פשוט.
ארכיון הקטגוריה: תוכנה
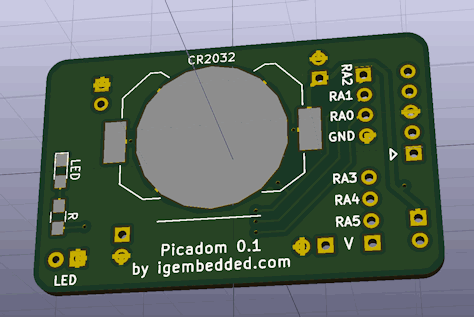
פיקאדום, יומן פרויקט: חלק ב'
אנחנו חוזרים, סוף כל סוף, אל פרויקט משדרי התת-אדום המינימליסטיים – והפעם נדבר על השרטוט הסכמטי, ובעיקר על תהליכים ואילוצים בתהליך שרטוט ה-PCB.
חיפוש מהיר של מיקומי GPS בקובץ
נתונה רשימה של קואורדינטות גאוגרפיות של נקודות ציון. הרשימה ארוכה מכדי לאחסן אותה בזיכרון המיקרו-בקר, ואנחנו צריכים לזהות בזמן אמת – על סמך מידע שמגיע ממודול GPS – אם אנחנו קרובים לאחת מנקודות הציון האלה. איך עושים זאת בצורה יעילה וחסכונית במשאבים?

לוגיקה בסיסית: מודול CLC ב-PIC החדשים
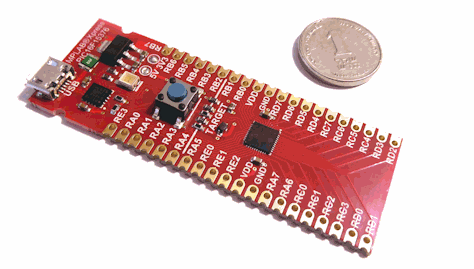
לוח ההערכה שקיבלתי במתנה מ-Microchip מהווה הזדמנות מצוינת להסביר ולהדגים את ה-CLC – אחד מהמודולים הפריפריאליים המוזרים והמעניינים ביותר שצצים במיקרו-בקרים בשנים האחרונות.
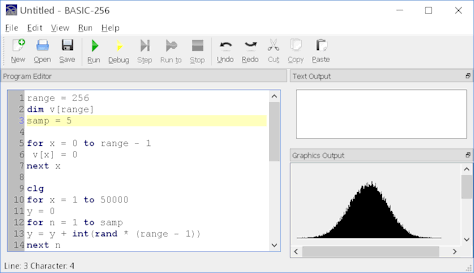
איך יוצרים התפלגות נורמלית
פונקציות ה-random המוכרות נותנות לנו התפלגות אחידה של תוצאות. מה עושים אם צריך דווקא התפלגות בצורת פעמון, או בשמה המקצועי "התפלגות נורמלית"? הנה פתרון פשוט, היישר משיעורי המבוא לסטטיסטיקה.
איך ליצור מזהה ייחודי ייחודי
באחד הפרויקטים שאני עובד עליהם לאחרונה, המיקרו-בקר התבקש ליצור לעצמו מספר זיהוי ייחודי לפי פקודה, ברמת אקראיות גבוהה מספיק כדי שמספרים "כפולים" יהיו נדירים גם במערכת שכוללת הרבה מיקרו-בקרים כאלה. מאיפה משיגים ביטים אקראיים כדי "להתניע" את מחולל המספרים הפסודו-אקראיים, ומה עושים כשהמחולל עצמו נותן לנו מעט מדי אפשרויות?
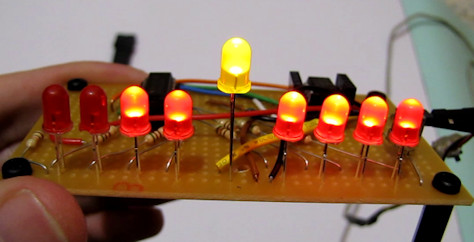
פרויקט: חנוכיית לדים בשלט רחוק
כמיטב המסורת, בניתי לכבוד החג חנוכייה אלקטרונית קטנה. הפעם מדובר בחנוכייה שאפשר לתפעל ממרחק באמצעות שלט רחוק של טלוויזיה.
CodeMonkey, טוב למתכנתים צעירים?
משרד החינוך שולח את ילדי בית הספר היסודי ללמוד תכנות בסביבת פיתוח מבוססת-רשת, שבה מנסים לגרום לקוף מצויר לאסוף בננות מצוירות. האם זו אכן שיטה יעילה? בתור מישהו שלמד לתכנת לפני שהייתה בכלל רשת, הנה ההתרשמות שלי מהקוף המפורסם.
קריאה מושלמת של Rotary Encoder, חלק ב'
האם אפשר לנסח אלגוריתם לקריאה של מקודד סיבובי, שפותר לגמרי את בעיית ה-Bounce מצד אחד, ומצד שני לא נופל בפח של היפוך כיוון הסיבוב כפי שקרה לאלגוריתם הקודם שלי?
0.000011574Hz, חלק ראשון
לפני שלוש שנים, בעודי לומד מה-Datasheet את התכונות הבסיסיות של המיקרו-בקר ATtiny85, גיליתי שאני יכול להפעיל אותו על בסיס אות שעון חיצוני בקצב איטי עד כדי גיחוך של 1Hz. בדיון הזעיר שהתנהל בנושא העליתי את הרעיון של עבודה בקצב איטי עוד יותר – עליית שעון אחת ביום, או 0.000011574Hz – כדי ליצור מערכת שמדליקה לד מדי שבת, כאשר אות השעון מבוסס איכשהו על המחזור הטבעי של יום ולילה.
הרעיון הזה מטופש מכדי להשאיר אותו לנצח בגדר תיאוריה, נכון? 🙂