אנחנו ממשיכים ללמוד את הפונקציות הבסיסיות של המיקרו-בקר הסיני הזול, והפעם נסתכל על פלט PWM בסיסי.
להמשיך לקרוא הפקת אותות PWM ב-CH32V003ארכיון הקטגוריה: מיקרו-בקרים
פסיקת טיימר בסיסית ב-CH32V003
בפוסט זה נפרט על הקוד וההגדרות הדרושים כדי להפעיל פסיקה מבוססת-טיימר במיקרו-בקר הסיני הזול, תוך שימוש בטיימר כללי (GPTM) במקום הטיימר הפשוט STK – כי אותו כבר ניצלנו ליצירת פונקציית millis…
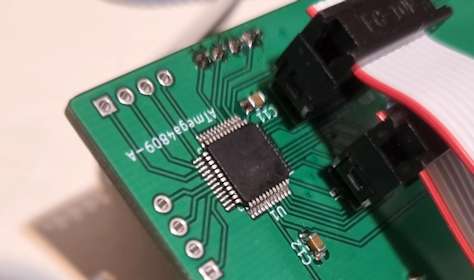
להמשיך לקרוא פסיקת טיימר בסיסית ב-CH32V003צלילה ל-EEPROM של ה-ATmega4809
מידע טכני שימושי יותר או פחות, שיעזור לנו להבין טוב יותר את ה-EEPROM של המיקרו-בקר, וכן לקרוא ממנו, לכתוב אליו ובכלל לנצל אותו באופן אופטימלי.
להמשיך לקרוא צלילה ל-EEPROM של ה-ATmega4809סכנה, דיודות הגנה!
כמה מהבאגים המרגיזים ביותר נובעים מאלמנטים, שאמורים דווקא להגן עלינו ועל הרכיבים שלנו. בפוסט זה נסתכל ספציפית על דיודות הגנה פנימיות של פיני קלט/פלט במיקרו-בקרים, ובאפשרויות להתמודדות איתן.
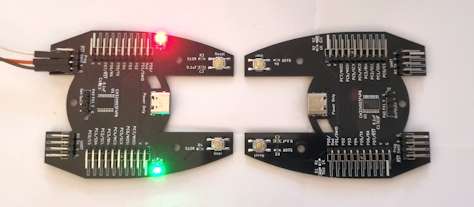
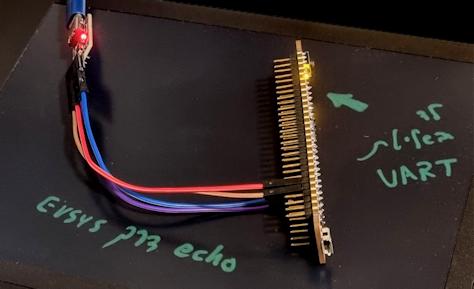
ה-Event System של AVR: הסבר והדגמה
כדי להישאר רלוונטיים בעולם האמבדד התחרותי, דגמי מיקרו-בקרים 8-ביט חדשים מקבלים עוד ועוד יכולות חומרה ש"עוקפות" את המעבד הפנימי המוגבל, מעשירות את ארגז הכלים שלנו כמפתחים וחוסכות רכיבים חיצוניים. בואו נראה כיצד עובדים עם מודול EVSYS שקיים בדור החדש של משפחת AVR, ושמקשר בין מודולים פריפריאליים שונים בלי צורך בתיווך של קוד רגיל או פסיקות.
יומני טומי, חלק ג': חומרה
כשמתכננים חומרה לפרויקט, מהם השיקולים לבחירה של רכיבים מסוימים ולא אחרים? הנה מספר דוגמאות מתוך פרויקט שיחזור הטומי.
פסיקות חיצוניות ב-CH32V003
בפוסט קודם קראנו קלט מלחצן באמצעות דגימות (polling) בקוד הראשי. בפוסט הזה נעבור לפתרון חכם יותר – שימוש בפסיקה, שתדאג לזהות שינוי במצב הקלט גם אם הקוד הראשי עסוק במשהו אחר. איך מגדירים את הפסיקה הזו במיקרו-בקר החדש שלנו?
תקשורת UART ב-CH32V003
לדיבוג, לתקשורת נתונים עם מחשב או לעבודה מול מודול חכם – UART הוא מרכיב בסיסי כמעט בכל פרויקט אמבדד. הגיע הזמן להפעיל אותו גם במיקרו-בקר הסיני החדש שלנו.

קלט דיגיטלי ואנלוגי ב-CH32V003
אנחנו ממשיכים ללמוד איך להפעיל את המיקרו-בקר הסיני הזול עם ליבת RISC-V, והפעם: קריאת קלט דיגיטלי, ועבודה בסיסית עם המרת ADC (קלט אנלוגי)
שעון ו-millis ב-CH32V003
אחרי שהצלחנו להבהב בלד, בואו נכיר את השעון הראשי של המיקרו-בקר הסיני, נפעיל אותו במהירויות שונות וניצור פונקציית millis מבוססת-פסיקות.